PARKING SPACE


1. For this design challenge, we were required to create a robot that was able to pick up and move plastic balls over a barrier.
2. This design challenge didn't require any research, as it was more tinkering with a design until we felt it was adept enough at completing the required fields. One thing we did study however, was the size of the balls being used so we could create a vessel for them to fit inside. The robot wouldn't work if it couldn't pick up anything!
3. There were to major steps involved in our process during this challenge.
- We designed a basic model that we felt would be successful, and then tested it.
- After the first few rounds of testing, we redesigned aspects of the machine that were not working as expected.
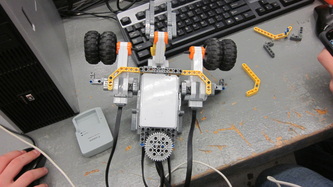
- Our final design consisted of a moving basket like structure that carried the balls vertically. The second most important part is a stationary structure acting as a hammer. It's purpose was to push the balls out of the basket and place them where it was aimed.4. In the competitions, our robot was working well, and had no problems functioning. However, our competitors design was interesting. Instead of placing the balls over the barrier from the front, it turned around and had a mechanism similar to a catapult, throwing the robot over the wall. The only problem was this was not always accurate, sometimes the ball would be launched outside of the arena.
5. One criticism that we and others found was the machine was difficult to control. The turning and propulsion worked fine, but the remote used to control it was not very accurate. However there was no definite way we could fix this. One thing that we did do to to minimize this problem was to gradually use the remote, instead of using it with all our force. This effectively increased the efficiency of our steering.
6. Spectating the different battles gave us different perspectives and ideas for moving the balls. One idea that we really liked as we said previously was the catapult concept. We learned different ways other than just a lift to move the balls, as lots of different groups had good, functioning robots.
7. If we were to do this project again, one thing we would do differently in this challenge would be to experiment more with designs, as different designs would be an interesting perspective.
2. This design challenge didn't require any research, as it was more tinkering with a design until we felt it was adept enough at completing the required fields. One thing we did study however, was the size of the balls being used so we could create a vessel for them to fit inside. The robot wouldn't work if it couldn't pick up anything!
3. There were to major steps involved in our process during this challenge.
- We designed a basic model that we felt would be successful, and then tested it.
- After the first few rounds of testing, we redesigned aspects of the machine that were not working as expected.
- Our final design consisted of a moving basket like structure that carried the balls vertically. The second most important part is a stationary structure acting as a hammer. It's purpose was to push the balls out of the basket and place them where it was aimed.4. In the competitions, our robot was working well, and had no problems functioning. However, our competitors design was interesting. Instead of placing the balls over the barrier from the front, it turned around and had a mechanism similar to a catapult, throwing the robot over the wall. The only problem was this was not always accurate, sometimes the ball would be launched outside of the arena.
5. One criticism that we and others found was the machine was difficult to control. The turning and propulsion worked fine, but the remote used to control it was not very accurate. However there was no definite way we could fix this. One thing that we did do to to minimize this problem was to gradually use the remote, instead of using it with all our force. This effectively increased the efficiency of our steering.
6. Spectating the different battles gave us different perspectives and ideas for moving the balls. One idea that we really liked as we said previously was the catapult concept. We learned different ways other than just a lift to move the balls, as lots of different groups had good, functioning robots.
7. If we were to do this project again, one thing we would do differently in this challenge would be to experiment more with designs, as different designs would be an interesting perspective.
