SUMO BOT
| sumo_powerpoint_1.ppt |
ROPE CLIMB
| rope_climb_bot.ppt |
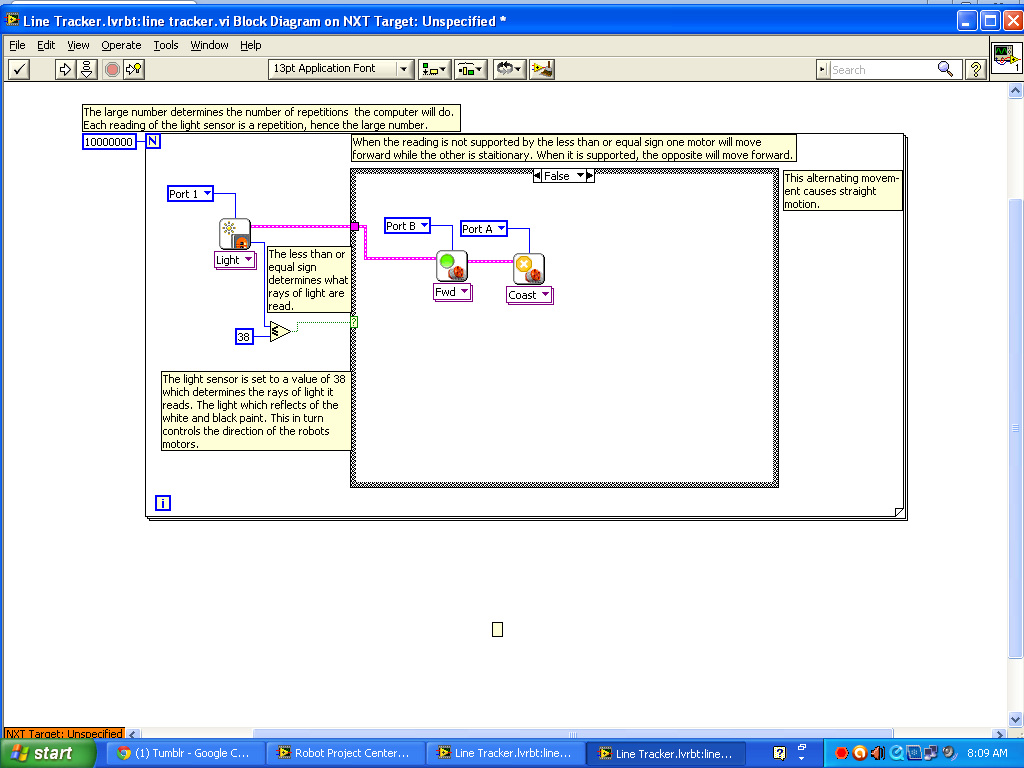
LINE TRACKER
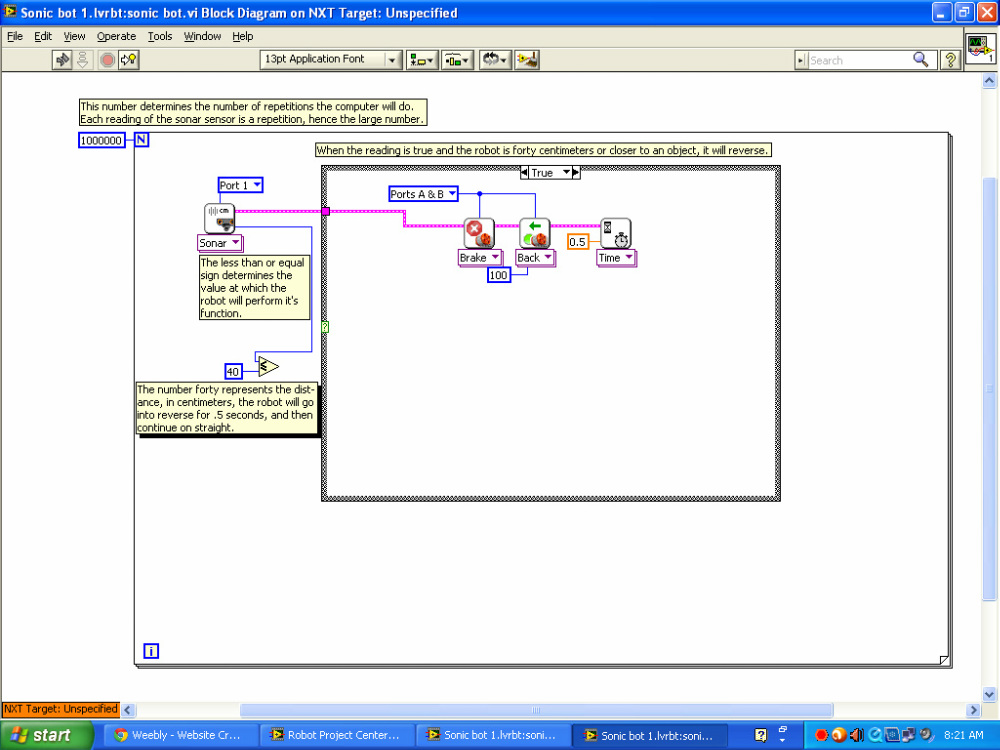
SONIC #1
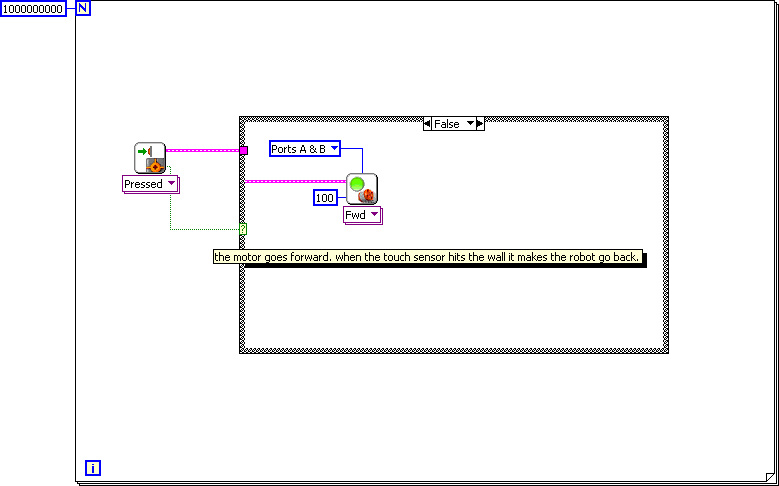
Push Bot
Bug Bot (Push Bot 2)
Search and Rescue Bot
For this design challenge we had to create a robot capable of being remote controlled, so we could get a water bottle from one side of the room to the other. in order do this assignment we had to mount a camera on to the robot and drive it with the remote that way instead of following the robot and making it that we needed to have a proper design. for this assignment we had to find and secure the water bottle and push it to the other side of the room all in 2 and half minutes or less.
We figured that the design for this challenged shouldn't be overly complex. All we did was make a simple, dual motor powered robot with a decent-sized divet in between the two motors. This divet would be the area in which the water bottle would be moved. Instead of placing a smaller wheel or set of wheels in the rear for turning, we added a stable, stationary hitch like piece. This allowed for easy and simple turning. Once the robot was created, all that needed to be done was to mount the camera on the surface. The best, and only logical place to put the camera, was on the top of the computer itself. This allowed for the best field of vision and didn't obstruct the movement of the robot in any way.
We figured that the design for this challenged shouldn't be overly complex. All we did was make a simple, dual motor powered robot with a decent-sized divet in between the two motors. This divet would be the area in which the water bottle would be moved. Instead of placing a smaller wheel or set of wheels in the rear for turning, we added a stable, stationary hitch like piece. This allowed for easy and simple turning. Once the robot was created, all that needed to be done was to mount the camera on the surface. The best, and only logical place to put the camera, was on the top of the computer itself. This allowed for the best field of vision and didn't obstruct the movement of the robot in any way.
